ロボット用センサー
 クラセンス
クラセンス

-
01
線状物が
ターゲットクラセンスは、 各種ケーブルをメインとした「線状物」の認識に特化した高速3Dビジョンセンサーです。
単芯、多芯、フラットケーブル、光ファイバー等の認識に強みを持ちます。 -
02
CADマッチング
不要クラセンスは、 事前に3DモデルやCADデータを読み込ませてのCADマッチングが不要です。
「見たものを見たまま」に、線状物を認識します。 -
03
各種ロボットと接続
高速形状認識クラセンスは、LANケーブル1本で、幅広いメーカーのロボットや、PLCと接続できます。
認識対象物
-
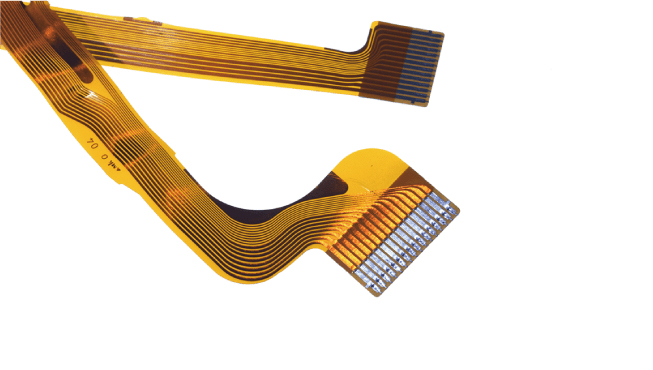
フラットケーブル
-
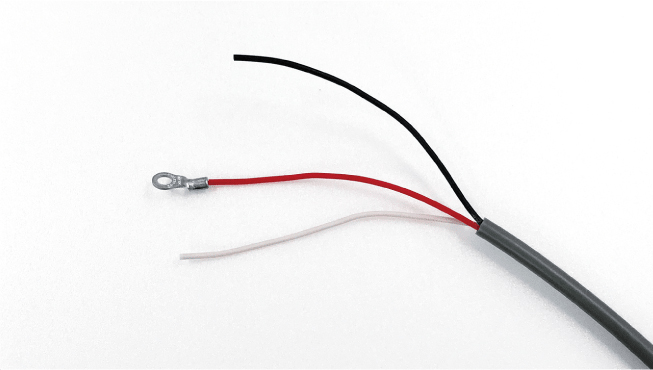
多芯ケーブル
-

束積みケーブル
-
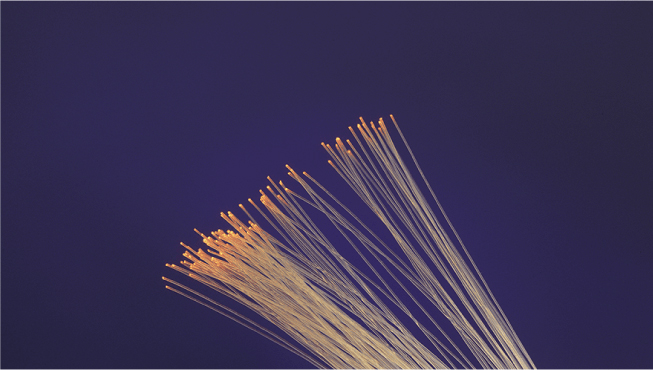
光ファイバー
-
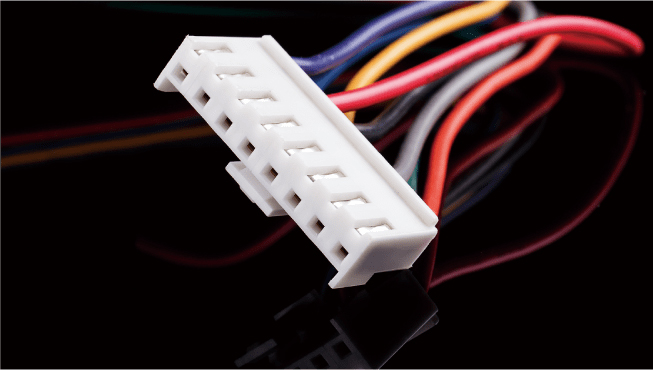
コネクタ
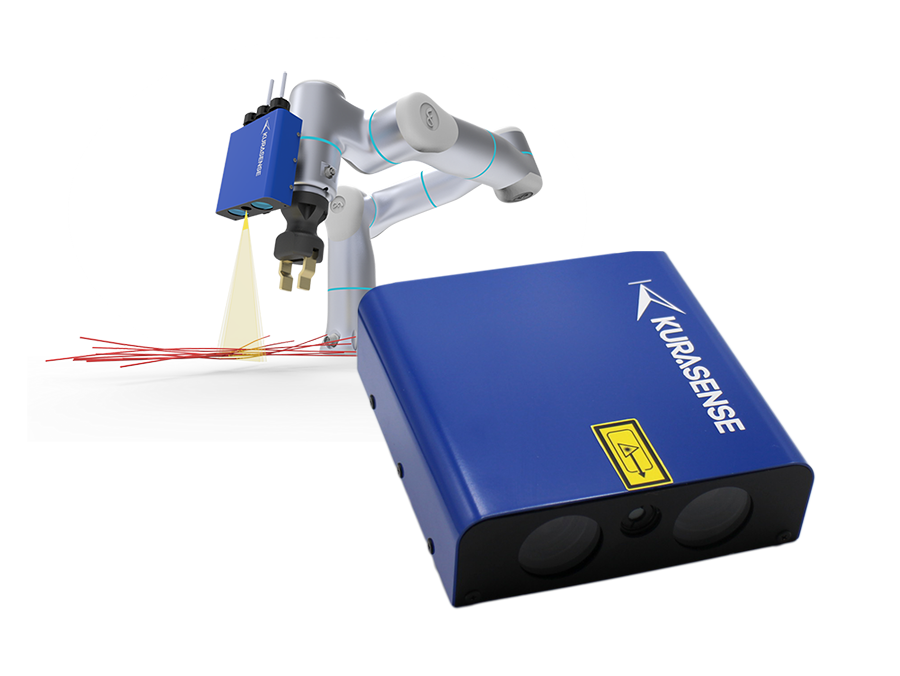
高速3Dビジョンセンサー(センサー分離型)
Kurasense-C300FX
バラ積みケーブル認識機能を追加
小型・超高精細3Dビジョンセンサー Kurasense-C100FXに、
束やバラ置き状態のケーブルから1本の把持位置を認識する機能を追加したモデルです。
- 認識対象物
- 電線、銅線、ケーブル、FFC/FPC、コネクタ
- 外形寸法
- 約 130 × 40 × 131 mm (ヘッド部) ※突起部を除く
- 質量
- 約 1.0 kg(ヘッド部)
- 計測範囲
- 58 × 39 mm
- 精度
- XY分解能:0.04 mm
Z分解能:0.2 mm - ワークディスタンス
- 200 mm ± 11 mm
- レーザー
- クラス 3R 520nm 最大 50 mW
- コントローラー
- 別置き
- 主な用途
- エンジン、大型ワークの製造工程、ハーネス組付・配策、ケーブル/コネクタ挿入など

高速3Dビジョンセンサー(センサー分離型)
Kurasense-C100FX/MX
ロボットハンドへ搭載可能な小型・高精細3Dビジョンセンサー
Kurasense-C100FX/MXは、センサーヘッドとコントローラー分離型の高速3Dビジョンセンサーです。
センサー部をロボットハンドに搭載することにより、従来機より小さく細いケーブルを高精度に認識するとともに、自動車のエンジンやトランスミッションなど大型対象物に対しても様々な方向からケーブルやコネクタを嵌合させることが可能です。
Kurasense-C100FX:小型・超高精細モデル
Kurasense-C100MX:小型・高精細モデル
- 認識対象物
- 電線、銅線、ケーブル、FFC/FPC、コネクタ
- 外形寸法
- 約 130 × 40 × 130 mm (ヘッド部) ※突起部を除く
- 質量
- 約 0.8 kg(ヘッド部)
- 計測範囲
- C100FX:58 × 39 mm
C100MX:120 × 70 mm - 精度
- C100FX:XY分解能:0.04 mm, Z分解能:0.2 mm
C100MX:XY分解能:0.08 mm, Z分解能:0.35 mm - ワークディスタンス
- C100FX:200 mm ± 11 mm
C100MX:300 mm ± 30 mm - コントローラー
- 別置き
- 主な用途
- エンジン、大型ワークの製造工程、ハーネス組付・配策など

高速3Dビジョンセンサー
Kurasense-C100MS/WS
ケーブルや、フラットケーブルを把持し、位置決めできる3Dビジョンセンサー
Kurasense-C100MS/WSは、高速な3Dスキャンと認識技術によって、従来のセンサーでは認識が困難だった線状物を見たままに認識できる、ロボット用センシングデバイスです。
Kurasense-C100MS:高精細モデル
Kurasense-C100WS:広範囲モデル
- 認識対象物
- 電線、ケーブル、FFC/FPC、コネクタなど
- 外形寸法
- 約 218 × 47 × 157 mm
※C100F/W相互アタッチメント無し
※突起部を除く - 質量
- 約 1.7 kg
※C100F/W相互アタッチメント無し - 計測範囲
- C100MS:213 × 133 mm
C100WS:391 × 244 mm - 精度
- C100MS:XY分解能:0.1mm Z分解能:0.4mm
C100WS:XY分解能:0.3mm Z分解能:0.9mm - ワークディスタンス
- C100MS:500 mm ± 30 mm
C100WS:500 mm ± 100 mm - コントローラー
- 別置き
- 主な用途
- ハーネス組付・配策、ケーブル/コネクタ挿入など