ロボット周辺機器
 クラボッテ
クラボッテ
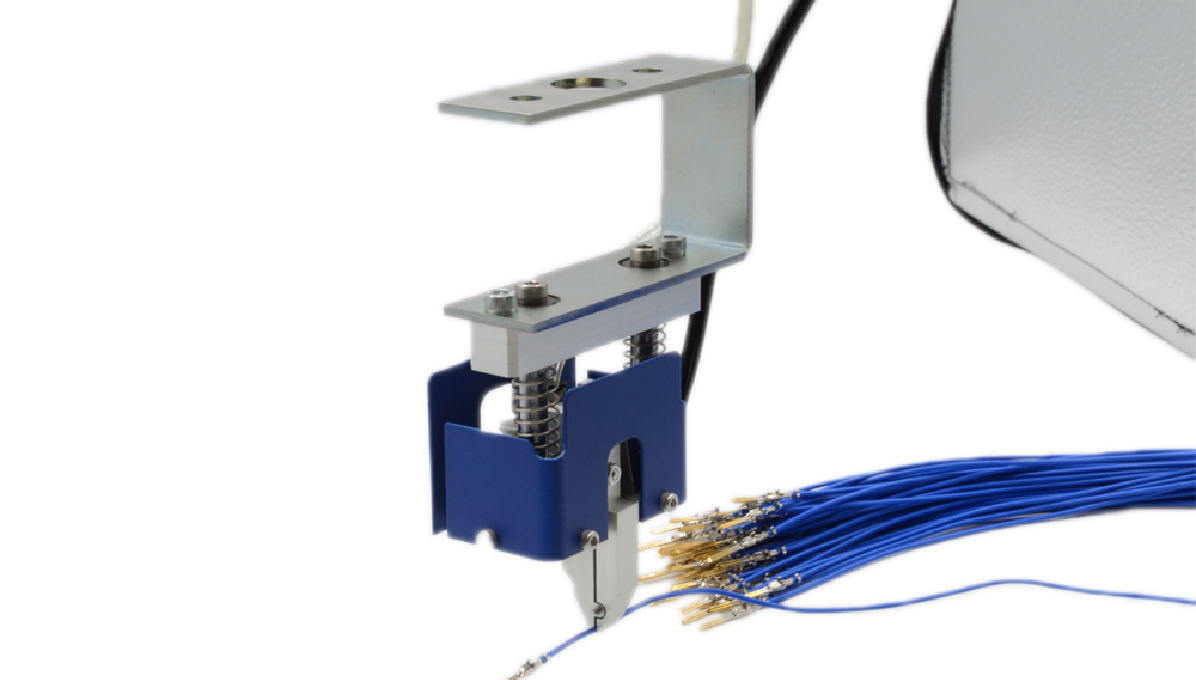
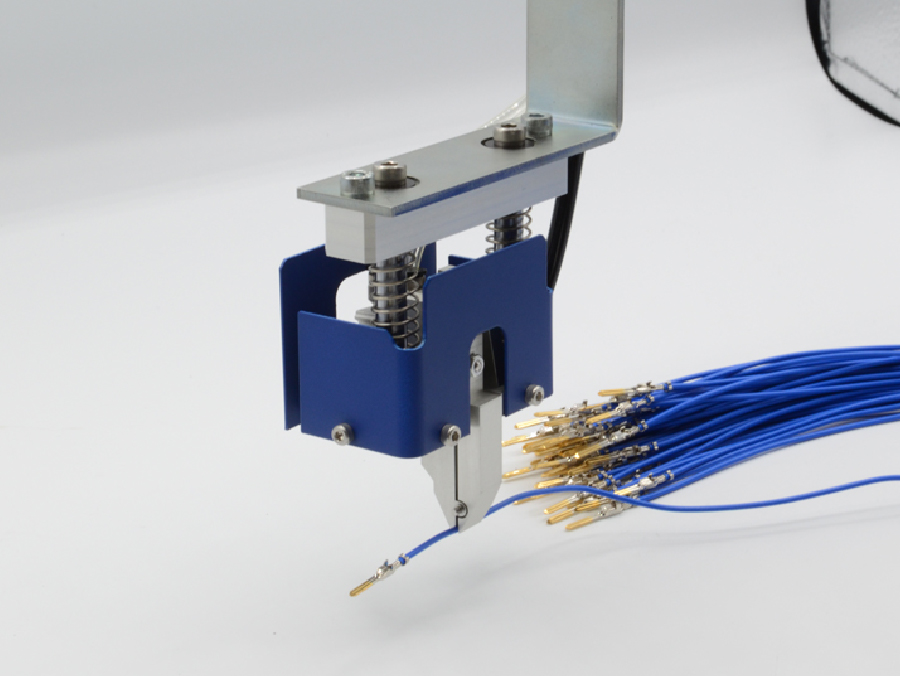
ケーブル転がしハンド
Kurabotte-Rシリーズ
圧着端子の向きを、ロボット手先で位置決め
把持したケーブルの向きを、任意の角度に転がすことができます。ロボットアーム姿勢変更の負荷を軽減し、ケーブル先端角度を位置決めします。
- 形式
- Kurabotte-R200
- 用途
- 圧着端子やコネクタの角度位置決め
- 構造
- 平行把持 + 摺動
- ストローク
- 15 mm
- 把持線径
- 1.0~2.0 mm
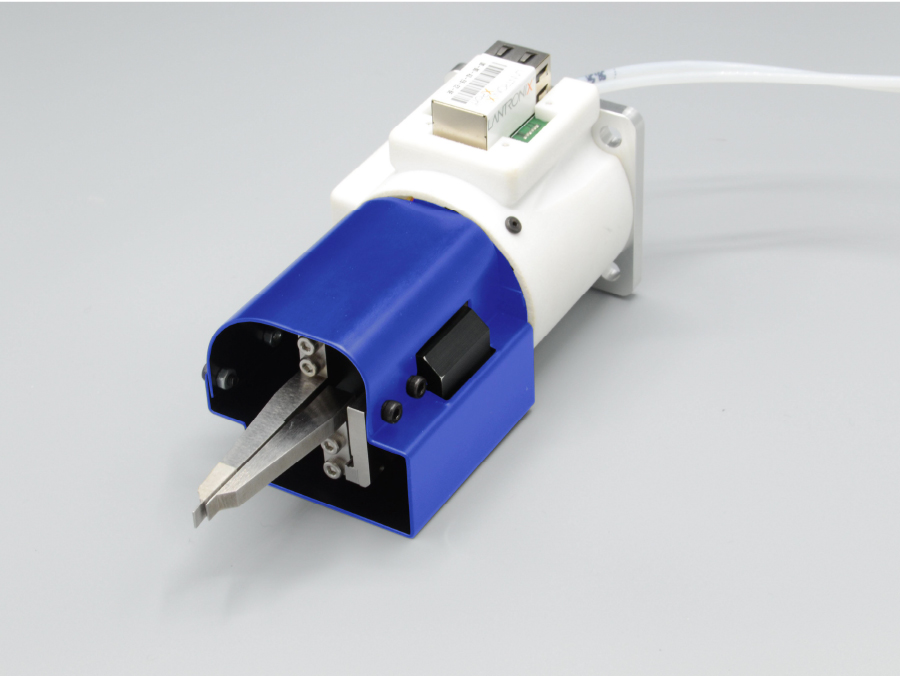
ケーブル束供給ユニット
Kurabotte-Pシリーズ
ケーブル束から1本ピックアップ
ケーブル加工の自動化プロセスで、ケーブル束による供給を実現します。専用設計のハンドとケーブルホルダーで、ケーブルを1本ずつ切り出します。
- 形式
- Kurabotte-P200
- 用途
- ケーブル束供給から1本ピックアップ
- 構造
- 専用構造 + 把持確認センサー
- 把持線径
- 1.0~2.0 mm
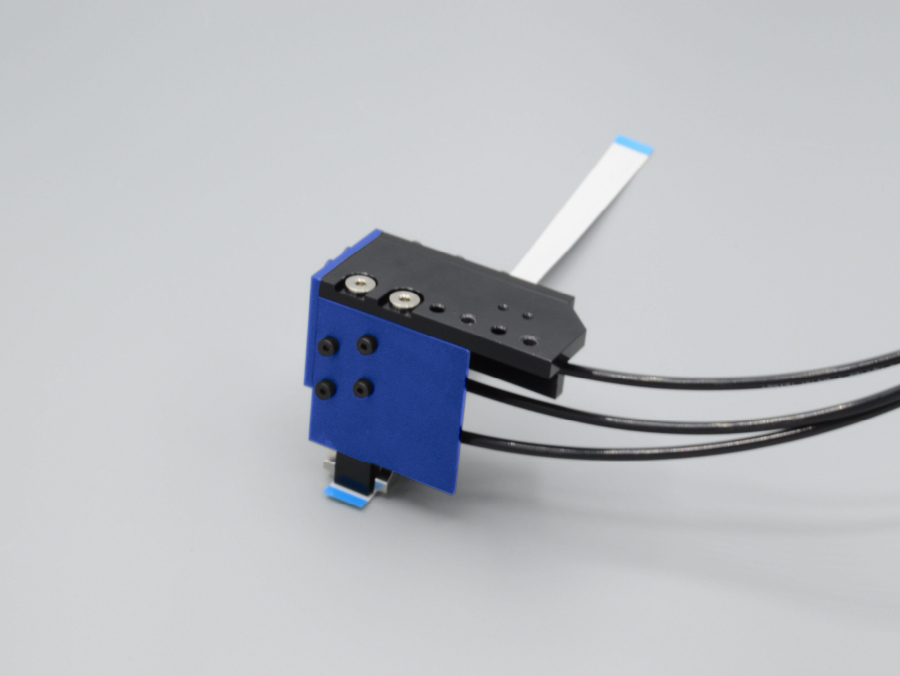
基板組立て用ハンド
Kurabotte-Iシリーズ
コネクタや、フラットケーブル把持に特化したハンド
Kurabotteシリーズで使用するハンドです。基板対基板コネクタや、フラットケーブル(FFC/FPC)の把持に最適化し、確実な把持と締結を実現します。
- 形式
- Kurabotte-I200B
- Kurabotte-I200F
- 対象物
- 基板対基板コネクタ
- フラットケーブル(FFC/FPC)
- 構造
- 専用構造
- 把持サイズ
- 9.0 x 3.0 ~ 18.0 x 5.0 mm
- 10.0~20.0 mm