3Dビジョンロボットシステム
KURASENSE
線状物ハンドリングへの挑戦
クラボウのKURASENSEシステムは、「見て」 「考える」 ロボットの目と脳の役割を果たす
ロボットビジョンセンサーで、従来では困難だった工場における柔軟な線状物
(ケーブル、コネクタ、FFC、FPC、ワイヤーハーネスなど)のハンドリングの自動化に取り組んでいます。
工場の自動化、組立作業の自動化のことなら、お気軽にご相談ください。
1分にまとめたクラボウのKURASENSEクラセンス
ロボット用センサー KURASENSE クラセンス

高速3Dビジョンセンサー
Kurasense-C300FX
(センサーヘッド分離型)
バラ積みケーブル認識機能付き小型・超高精細3Dビジョンセンサー
詳しく見る

高速3Dビジョンセンサー
Kurasense-C100FX/MX
(センサーヘッド分離型)
センサーヘッド部をロボットハンドへ搭載可能な小型3Dビジョンセンサー
超高精細モデル:Kurasense-C100FX
高精細モデル:Kurasense-C100MX
詳しく見る

高速3Dビジョンセンサー
Kurasense-C100MS/WS
(センサーヘッド一体型)
ケーブルや、フラットケーブルを把持し、位置決めできる3Dビジョンセンサー
高精細モデル:Kurasense-C100MS
広範囲モデル:Kurasense-C100WS
詳しく見る
ロボットシステム Kurassem クラッセム
電子デバイス組立ロボットシステム
基板上のコネクタを、人並みの速さで締結します。
詳しく見る

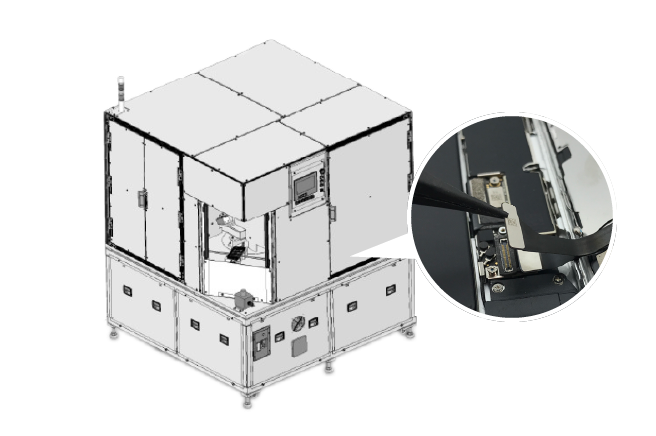
フラットケーブル締結システム
フラットケーブルの高さやねじれを捉え、ロボットで組立てます。
詳しく見る
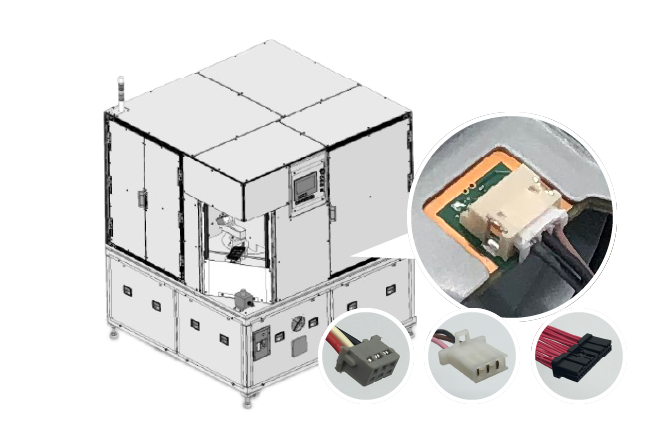
角形コネクタ締結システム
角形コネクタの形状や向きを捉え、ロボットで組立てます。
詳しく見る
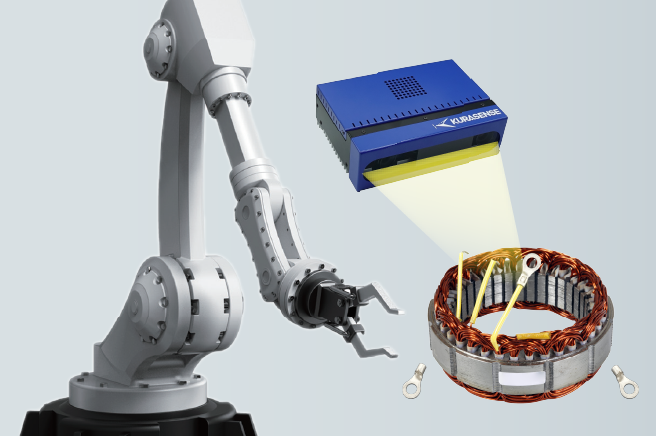
モーターステーター組立て
支援ユニット
モーターステーターで使用されている銅線の巻き付けや端子圧着、コネクタの挿入などを支援するユニットです。
詳しく見る
ロボットパッケージ kurassem クラッセム
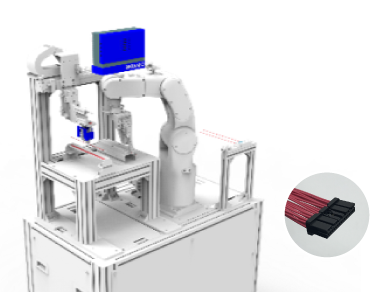
ワイヤーハーネス製造ロボットパッケージ
バラ状態のケーブルをセットするだけで、自動でワイヤーハーネスを製造するロボットパッケージです。お客様のご要望に合わせてカスタムが可能です。
詳しく見る
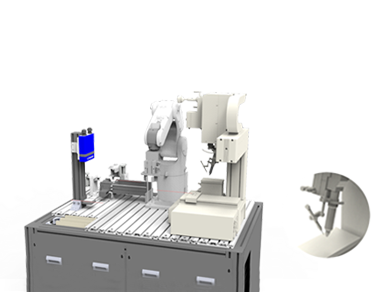
リード線自動はんだロボットパッケージ
リード線の自動はんだ付けに特化したロボットパッケージです。お客様のご要望に合わせてカスタムが可能です。
詳しく見る
ロボットパッケージ Kuravizon クラビゾン
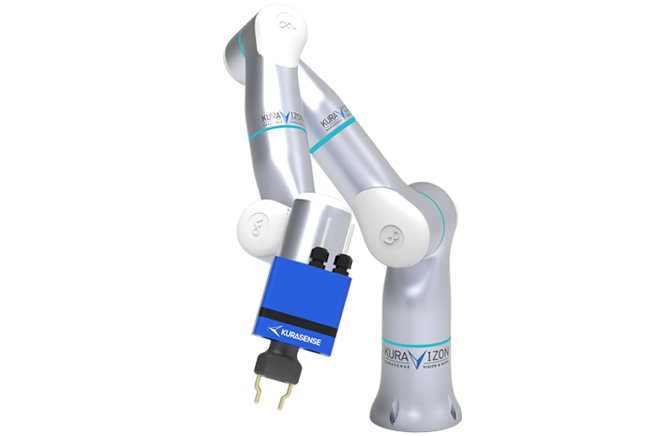
ロボットパッケージ
KURAVIZON
3Dビジョン + ロボット
7軸協働ロボットシステムパッケージ
高度な力制御機能と7軸の繊細な動作で、
本来は人の手を要する繊細な作業の自動化や、ラボ・製造現場を支援。
詳しく見る
ケーブル自動化 ロボット事例
-
3DビジョンセンサーKURASENSEがよくわかる取材風動画
3DビジョンセンサーKURASENSEについて、製品コンセプトや特長がよくわかる、取材風の説明動画です。2019年の国際ロボット展での展示物を通して、ハンドリング対象物や「KURASENSEでできること」について詳しく説明しています。

-
ワイヤーハーネス製造ロボット
電線束から1本取出し、端子圧着、コネクタへの挿入を約10秒で実現します。
お客様のご要望に合わせ、はんだ付けや特性検査など、カスタマイズ可能です。
2023.5.23.追加しました。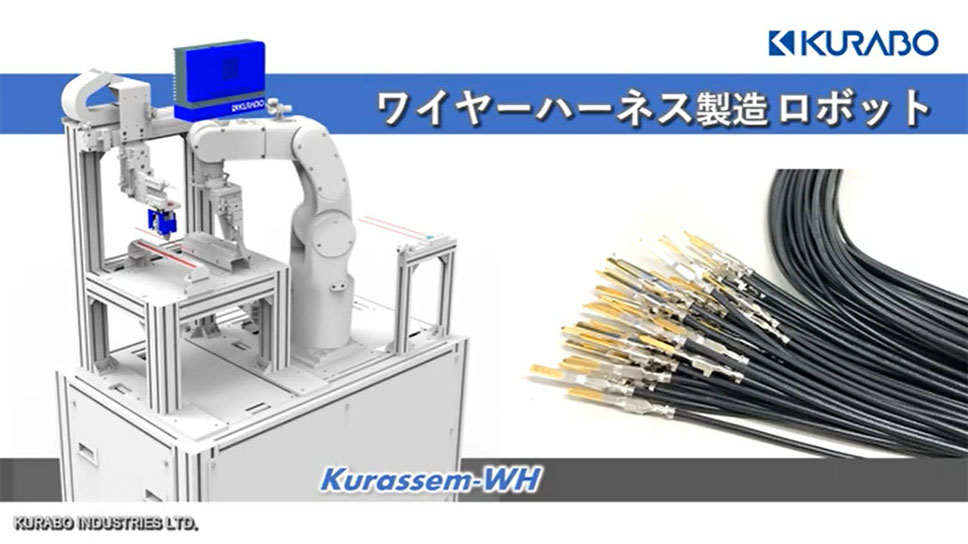
-
角型コネクタ把持挿入 ロボットによる自動組立て
クラセンス x 角形コネクタ
3DビジョンセンサーKURASENSEで角型コネクタを3D認識し、産業用ロボットでメス側へ自動嵌合する動画です。
サブハーネスの組付けなど、コネクタ嵌合作業に適したアプリケーションで、2022年国際ロボット展のSIerブースに展示しました。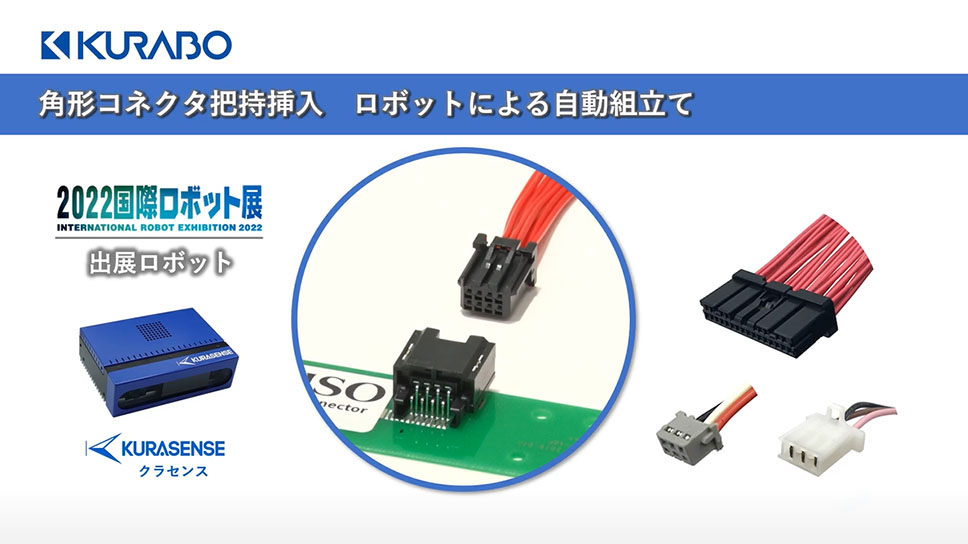
-
フラットケーブル高速自動挿入ロボット
クラセンス x EPSONロボット
3DビジョンセンサーKURASENSEと、セイコーエプソン製のロボット+力覚センサーを用いて電子機器のフラットケーブル挿入の自動化を実現した動画です。
パソコン、カメラ、センサー、家電製品、ゲーム機などの製造工程における電子基板組み立ての自動化が実現できるアプリケーションです。
-
線状物自動挿入ロボット(協働ロボット)
クラセンス x ABB YuMi (人型協働ロボット)
3DビジョンセンサーKURASENSEと、ABB製の人型協働ロボットYuMiを用いて、φ0.5mmの光ファイバーの両端を把持して、φ2mmの穴へ「正確」に挿入する動画です。線状物を加工機(外観検査装置、洗浄装置、成型機、かしめ機、圧着機など)へセットする作業の自動化が実現できるアプリケーションです。

-
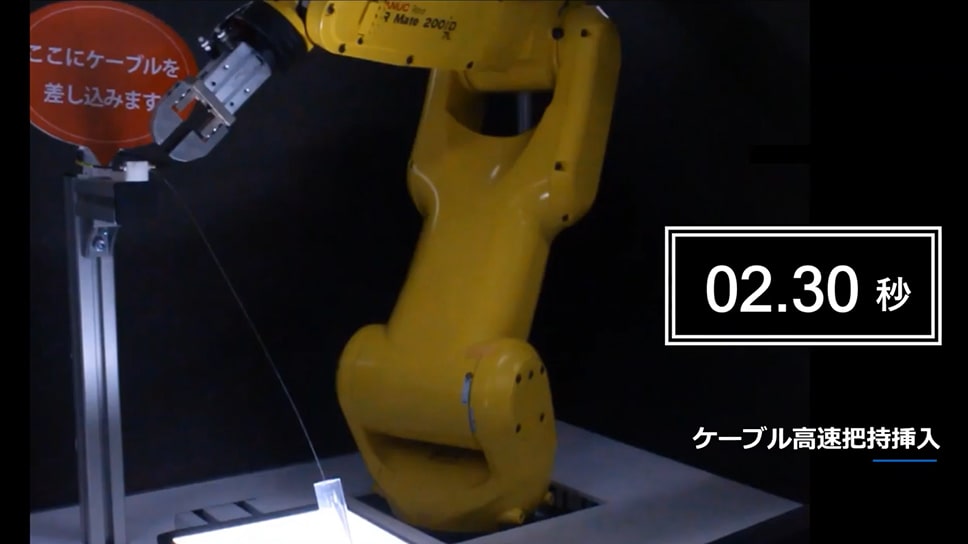
線状物高速挿入ロボット
クラセンス x FANUCロボット
3DビジョンセンサーKURASENSEと、ファナック製のロボットを用いて、Φ0.5mmの光ファイバーの先端を把持して、φ3mmの穴へ「人に匹敵する速さ」で「正確」に挿入する動画です。ワイヤーハーネスの製造・組付け作業の自動化が実現できるアプリケーションです。
-
ロボットで電線を圧着端子へセット
3DビジョンセンサーKURASENSEと産業用ロボットを用いて、電線を圧着端子ヘセットします。
高速なケーブルの3D認識技術で、電線の曲がりや揺れがあっても認識し、ロボットで把持した後、ターゲットに挿入します。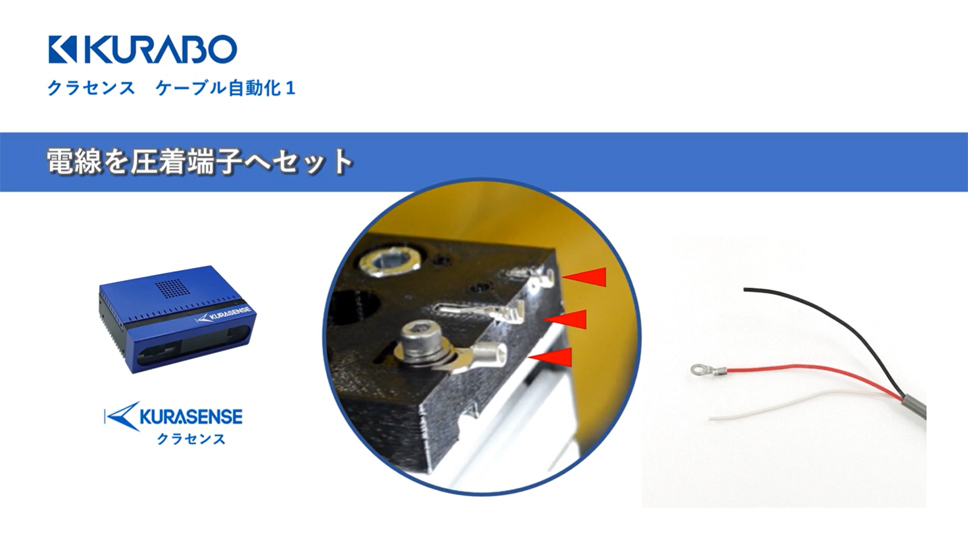
-
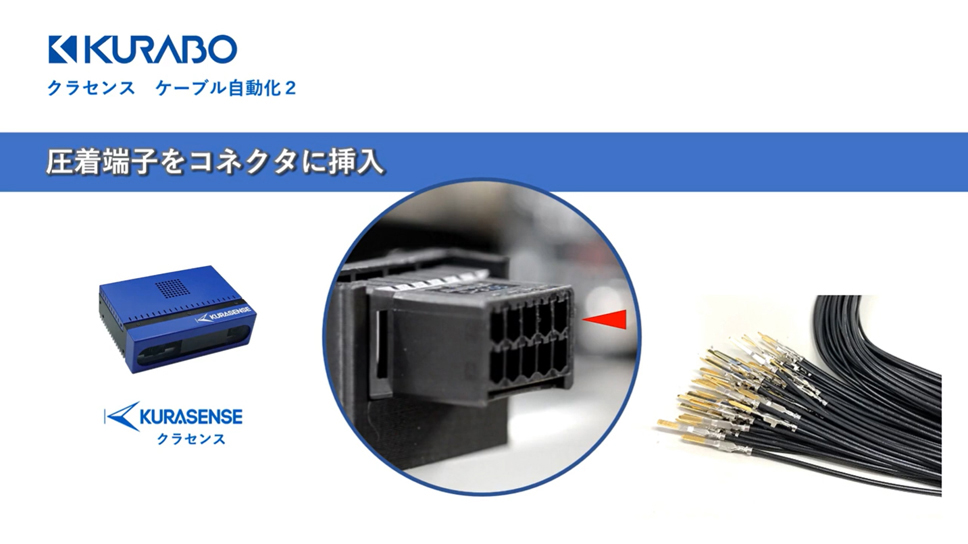
ロボットで圧着端子をコネクタに挿入(転がしハンド)
クラセンス x ケーブル転がしハンド
3DビジョンセンサーKURASENSEと、産業用ロボットを用いて、圧着端子(コンタクト)をコネクタ(ハウジング)へ挿入します。圧着端子の回転位相を計算し、「ケーブル転がしハンド」で向きを調整します。そして端子先端を3D認識し、コネクタヘ挿入します。
-
コネクタ自動挿入ロボット(協働ロボット)
クラセンス x DENSO COBOTTA
3DビジョンセンサーKURASENSEと、デンソーウェーブ製COBOTTA 2台を使って、COBOTTA自身の基板へのハーネス組付けを実現した動画です。

NEWSお知らせ
過去のお知らせ一覧-
2026/6/22更新
EVENT
「電子機器2026トータルソリューション展」に 7軸協働ロボットシステム KURAVIZON(クラビゾン)、
リード線自動はんだロボットパッケージ、 3Dビジョンセンサー Kurasense他を出展いたしました。
出展レポート
開催期間:2026/6/10(水)~12(金) 東京ビッグサイト -
2025/9/22
PRODUCTS
-
2025/9/22
PRODUCTS
KURASENSE(クラセンス)ページに新製品を追加しました。
高速3DビジョンセンサーKurasense(クラセンス)-C300FX
-
2025/1/9
PRODUCTS
7軸協働ロボットシステム『KURAVIZON(クラビゾン)』を販売開始
~アメリカ「Flexiv(フレキシブ)」社と業務提携契約を締結~
柔軟物ハンドリングへの挑戦
クラボウ環境メカトロニクス事業部では、
ビジョンセンシング技術(=目の技術)をコアに、
従来では困難だった、工場における柔軟物ハンドリングの自動化に取り組んでいます。
製造業界における最大の課題は人手不足です。
人口の減少に加えて、高い人件費が前提となる事業環境は
日本固有の問題ではなく、海外においても同様であり、
より人件費が有利な地域・国で生産拠点を構えるビジネスモデルは、
早晩、成り立たなくなるといわれています。
もはやロボットによる作業の自動化は人件費との比較ではなく、
安定した事業継続のため、ものづくりで生き残るための重要な選択です。
クラボウでは、これまでのカメラを中心とした蓄積技術を生かし、
eyeカンパニー・クラボウとして外観検査、3次元計測、
そしてロボットの領域で、持続可能な社会づくりに貢献していきます。
